
累计培训学员50万+
全网“狠”受欢迎的高中数学老师·全网亲自带学生审题、算题、练题
·18年高考数学教学经验熟谙高考命题规律
·被称为:“题型方法大师”
"精准拿捏高考数学的人" 模块化知识体系
系统性强
课程按高考数学考点构建清晰的知识框架,帮助学生建立完整的数学思维逻辑。
动态化教学适配
真题驱动
以近18年高考真题为核心,分析命题趋势,提升灵活应用能力。
高效解题方法论
题型归纳+二级结论
总结高频考点,高中全部模块题型归纳,强化应试效率。
显哥课程自述
显哥凭借18年教学经验和对高考的深度研究以高考标准教你如何审题,如何思考,如何用多个方法去解题。让你真正的理解数学,喜欢数学,拿下数学!让显哥带你捅破窗户纸,数学冲刺140+
高一上学期
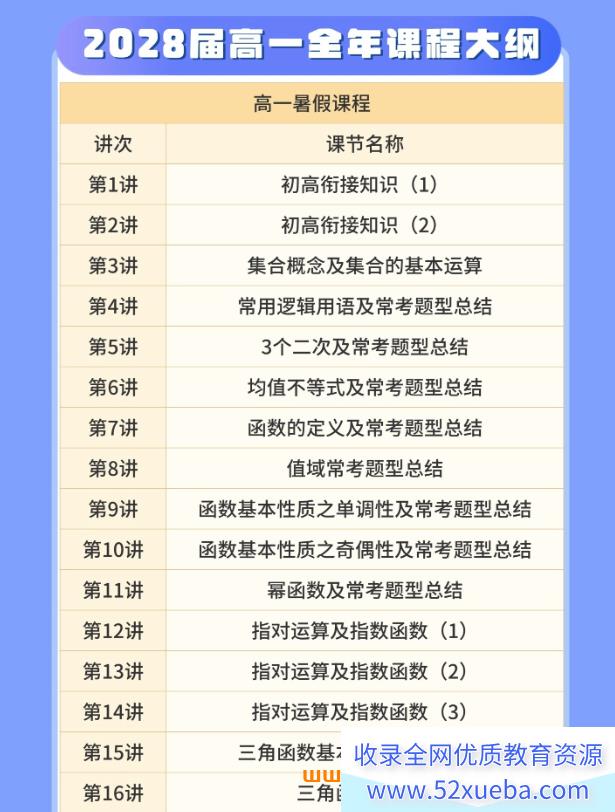
暑假课程:基础夯实预习阶段
①高一上学期全模块知识概念讲解2)基础知识延伸及技巧拓展
③亲自带学生审题、算题、练题4高考考点为纲感受高考难度
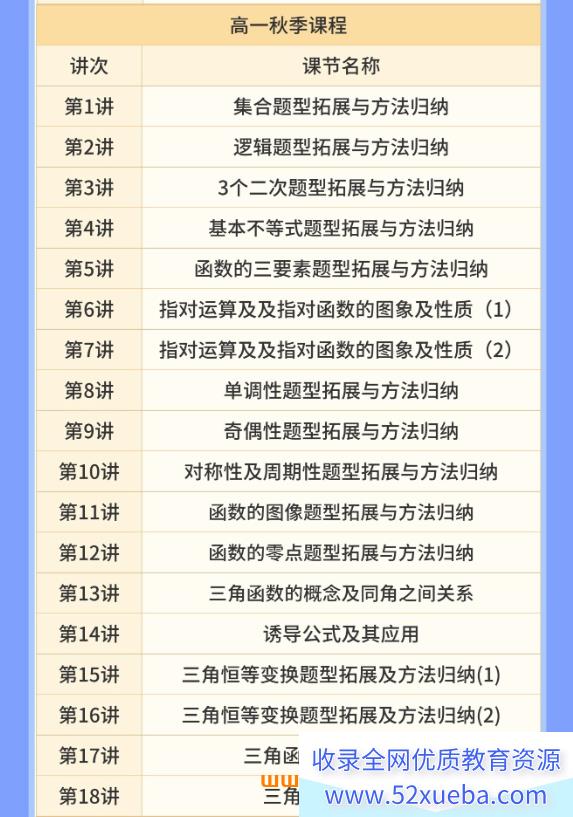
秋季课程:拉练提升拔高阶段
①多维度题型深度训练,难度进阶2)全题型总结梳理搭建数学知识框架3亲自带学生审题、算题、练题
高一下学期
塞假课程:基础夯实预习阶段
①高一下学期近90%的知识概念讲解②解题思路拓展打开数学格局
3亲自带学生审题、算题、练题4高考考点为纲感受高考难度
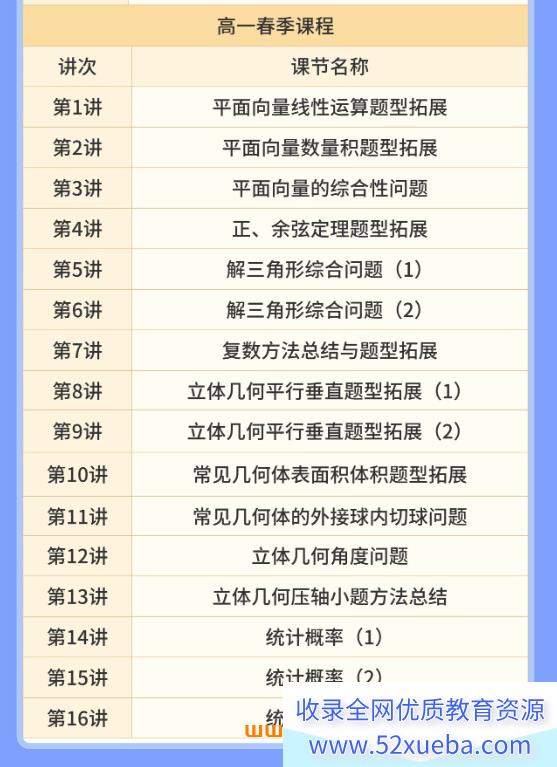
春季课程:拉练提升拔高阶段
①同模块深度讲解,难度拔高2全题型总结梳理搭建数学知识框架③亲自带学生审题、算题、练题

高一上
暑假课程
初高衔接知识点拔高+集合+基本不等式+常用逻辑用语+函数性质+指对幂+三角函数预习新知巩固基础
秋季课程
集合+常用逻辑用语+基本不等式+函数性质+指对幂+三角函数综合提升难度进阶 高一下
塞假课程
平面向量+解三角形+立体几何预习新知巩固基础
春季课程
平面向量+解三角形+复数+立体几何+统计概率综合提升难度进阶 课程特色
寒、暑假课程:基础夯实预习阶段
①概念讲解、知识预习
通俗易懂讲解高一学期知识概念,通过显哥独道的知识理解,帮助学员更简单,更快捷,更系统的消化吸收概念,建立起取得高分的知识基础框架。
2)通法教学、技巧拓展
以常规方法破局,教学讲究一力破万法;多个解题思路拓展,技巧拓展,大招常规化。
3亲自带学生审题、算题、练题全网亲自带学生一起解题,逐问逐步带学生计算,让学生更直观的理解每一个题型是如何审题,如何入手,如何计算。
4高考考点为纲精选高考题型,为你讲解每一个题型高考涉及分值,考点;提前感受高考。
⑤全面覆盖、高效学习高一近乎90%内容充分预习,高度压缩,高含金量,高效学习,让你在短时间内吸收掉尽可能多的数学知识方法技巧,助力入校无缝衔接高中内容并遥遥领先其他同学起跑线。
春、秋季课程:拉练提升拔高阶段
①多维度题型深度训练在通法教学、技巧拓展的基础上进一步进阶,配合各种优质模拟题,高考题综合训练,快速提分
②亲自带学生审题、算题、练题全网亲自带学生一起解题,逐问逐步带学生计算,让学生更直观的理解每一个题型是如何审题,如何入手,如何计算。
③超全题型总结及知识梳理精炼概括对应知识模块几乎所有高考题型,为你搭建完整清晰数学知识框架;知识题型全梳理让你清楚每一个题型如何巧妙破解,真正做到数学无难题。 课程说明
高一数学全年班
2025年7月3号-2026年6月
系统内课时
【正式课60节】60*2=120小时【暑秋课程+寒春课程)
高一重点全部内容
原文链接:https://www.52xueba.com/26575.html,转载请注明出处~~~
学霸从小培养!52学霸网收录早教、小学、中学、高中及青少年身心健康及抗压能力课程资源
收录学习资源全面、高效、资源陆续更新中,欢迎下载!
猜你喜欢






评论0